Команда исследователей из Университетского колледжа Лондона разработала технологию акустической голографии, которая пригодна для использования в людных местах. Она базируется на комбинации акустической левитации и голографии, при этом имеет потенциал применения в музеях и рекламе, в том числе для реализации интерактивных инсталляций.
Технология акустической левитации построена на принципе использования механической энергии звука для манипулирования находящимися в воздухе объектами. Задействовав в качестве объекта кусок ткани, засвечиваемый проектором, ученым удалось получить голограмму, положением которой можно управлять в трехмерном пространстве. Подобные разработки уже производились прежде, но лишь в пустых помещениях, где отсутствовали какие-либо посторонние предметы, отражающие или рассеивающие звуковые волны, тем самым препятствуя перемещению объектов по заданной траектории.
В новом исследовании был применен специальный алгоритм, способный со скоростью более 10 000 обновлений в секунду анализировать вносимые предметами искажения и компенсировать их, в реальном времени управляя звуковыми волнами. Более того, в одном из продемонстрированных исследователями прототипов пользователи могут контролировать местоположение левитирующего объекта при помощи вносимого в звуковое поле предмета, например, человеческой руки.
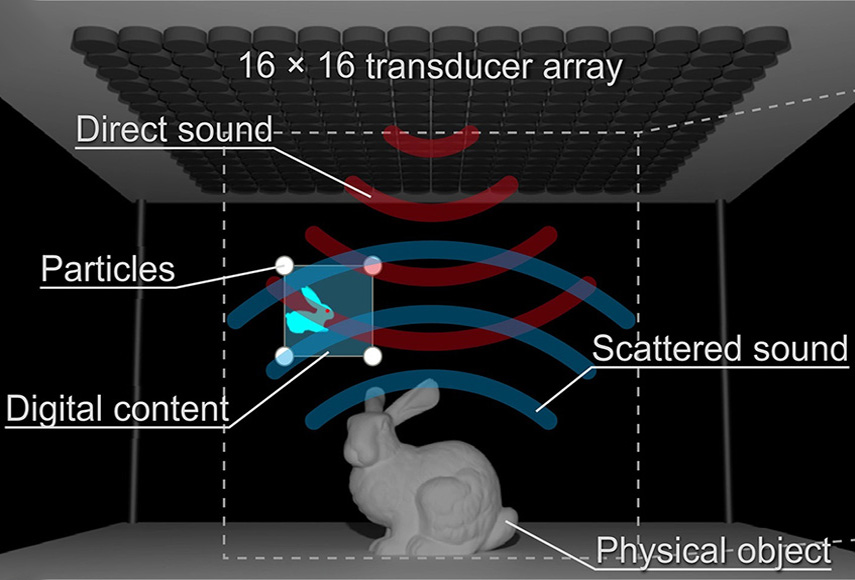
Созданный учеными прототип включает массив из 256 небольших громкоговорителей Murata MA40S4S, размещенных на потолке в конфигурации 16 х 16 и воспроизводящих ультразвуковые волны определенной формы, проектора Texas Instruments DLP LightCrafter Evaluation Module с разрешением 608 × 684 пикселей и куска легкой акустически прозрачной ткани с приклеенными к ней четырьмя кусками пенополистирола, выступающими в качестве якоря. Во время эксперимента на полу в центре располагался пластиковый кролик, а над ним перемещалась его голограмма. В других прототипах, реализованных похожим образом, над кроликом летала бабочка из светящихся бусин, крыльями которой можно было управлять при помощи пальцев.
Комментирует Рюдзи Хираяма, преподаватель кафедры компьютерных наук Университетского колледжа Лондона и один из авторов проекта:
«Изначально мы работали над акустической левитацией только в пространствах, заполненных рассеивающими звук предметами, которые неподвижны или движутся несколькими предсказуемыми способами, например, когда рука пытается коснуться левитирующей голограммы. Наша следующая цель – усовершенствовать технологию, чтобы при хаотичном движении предметов в помещении наша система могла в реальном времени реагировать на это и левитация продолжалась по заранее запрограммированному сценарию, а левитирующий объект адекватно изменял свое положение относительно предметов в точном соответствии с предусмотренным алгоритмом».